
I am currently a Research Scientist at Meta. I received my PhD studying robotics & AI in the Stanford ARMLab, where I was advised by Monroe Kennedy III. My doctoral research centered on improving collaboration in physical human-robot tasks. I was supported by the NSF Graduate Research Fellowship.
Previously, I was advised by Nanshu Lu as an undergraduate at UT Austin.
Contact: [firstname][lastname]media[at]gmail[dot]com
Benchmarking Platforms
|
[GitHub] table-carrying-ai. An open-source Gym-style benchmark environment for human-robot cooperative table carrying, designed as a platform for training and evaluating collaborative algorithms. |
Publications
|
[Webpage] [Paper] [Video] [Code]Diffusion Co-Policy for Synergistic Human-Robot Collaborative Tasks. |
|
[Webpage] [Paper] [Video] [Code]It Takes Two: Learning to Plan for Human-Robot Cooperative Carrying. |
|
[Paper]Learning Action and State Sampling Distributions for Human-Robot Collaboration. |
|
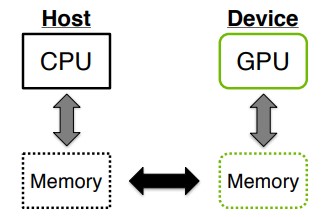
[Paper]GPU accelerated prognostics. |
|
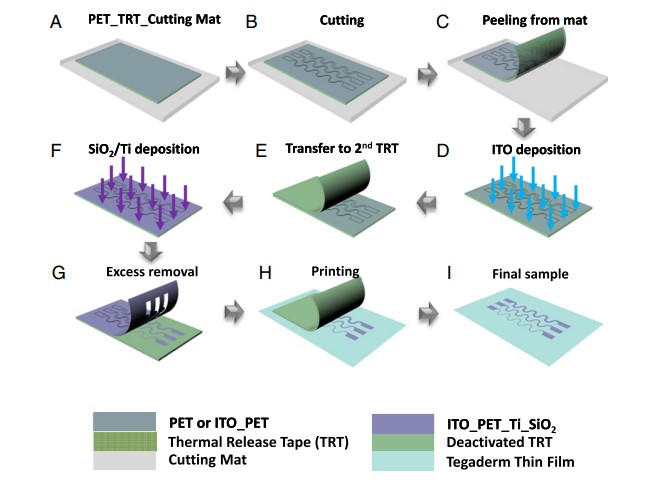
[Paper]Indium Tin Oxide (ITO) serpentine ribbons on soft substrates stretched beyond 100%. |
News
- 10/18/23 Our latest work, Diffusion Co-Policy for Synergistic Human-Robot Collaborative Tasks, has been accepted to RA-L!
- 7/1/23 My thesis, titled “Long-horizon prediction for human-robot collaboration”, is now available online!
- 2/21/23 Excited to release the repository for the cooperative table-carrying task, a cooperative multi-agent continuous state-action gym environment! Feel free to check it out, and consider using it to benchmark your cooperative algorithms.
- 2/19/23 Code for the cooperative planner has been released.
- 1/16/23 My paper, “It Takes Two: Learning to Plan for Human-Robot Cooperative Carrying”, has been accepted to ICRA 2023 in London, UK!
- 6/11/22 My work on “Learning Action and State Sampling Distributions for Human-Robot Collaboration”, has been accepted to the Workshop on Learning from Diverse, Offline Data (L-DOD) at RSS 2022.