Code Releases
Open-source implementations and environments related to my recent work.
|
[GitHub] table-carrying-ai. An open-source Gym-style benchmark environment for human-robot cooperative table carrying, designed as a platform for training and evaluating collaborative algorithms. |
Publications
|
[Webpage] [Paper] [Video] [Code] Diffusion Co-Policy for Synergistic Human-Robot Collaborative Tasks. E. Ng, Z. Liu, M. Kennedy III. IEEE Robotics and Automation Letters, 2023. |
|
[Webpage] [Paper] [Video] [Code] It Takes Two: Learning to Plan for Human-Robot Cooperative Carrying. E. Ng, Z. Liu, M. Kennedy III. 2023 IEEE International Conference on Robotics and Automation (ICRA), 7526-7532, 2023. |
|
[Paper] Learning Action and State Sampling Distributions for Human-Robot Collaboration. E. Ng, Z. Liu, M. Kennedy III. Workshop on Learning from Diverse, Offline Data (L-DOD) at RSS 2022, 2022. |
|
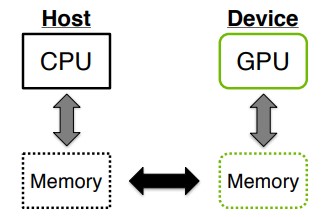
[Paper] GPU accelerated prognostics. G. E. Gorospe Jr, M. J. Daigle, S. Sankararaman, C. S. Kulkarni, E. Ng. Annual Conference of the PHM Society, 2017. |
|
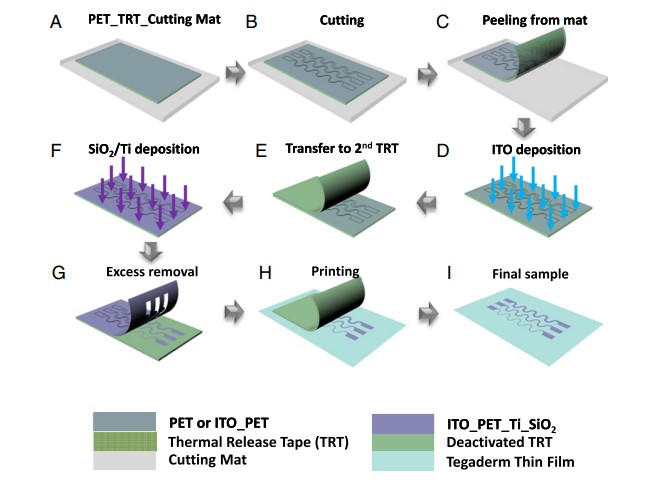
[Paper] Indium Tin Oxide (ITO) serpentine ribbons on soft substrates stretched beyond 100%. S. Yang, E. Ng, N. Lu. Extreme Mechanics Letters, 2015. |